



無拘束下で動物の姿勢均衡・各肢にかかる体重負荷を別々に測定
「Incapacitanceテスト」と呼ばれる試験装置は痛覚試験ではよく知られております。Von Frey試験などのほかの痛覚試験との相対性が見られますが、動物の体位に依存する課題もありました。
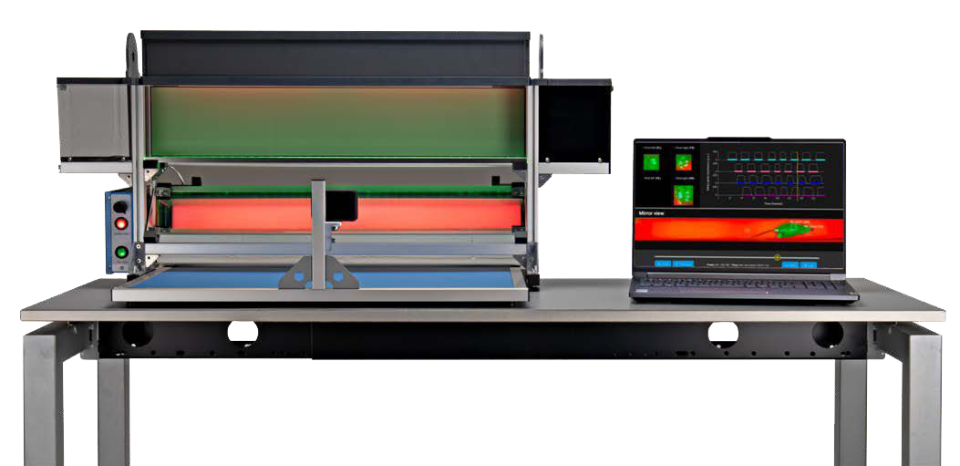
Bioseb社が開発したDynamic Weight Bearingシステム(体重負荷測定装置)は、無拘束下における小動物の四肢の重量を個別に測定します。各脚の平均圧力から痛みを評価したり、各脚の時間配分などが測定できます。
この体重負荷試験装置は、圧センサーフロア付きのケージとカメラで構成されます。
データ収集時には、圧力データとビデオカメラの動画と同期されます。録画した動画ファイルを使用して実験を再現することで、動物の振る舞いや行動を補足し、圧力データに対して対応する四肢を特定します。同じ試験からより多くの情報を得ることができます。
結果ウィンドウには、指定した時間間隔ごとに、動物の四肢の体重分散が平均値や差異係数と共に、数値やグラフとして表示されます。
データは全てExcelファイル形式で提示されます。
新バージョンv2 でより使いやすく、正確に!
- センサーのサンプリングレートが10/s から30/s に増え、より正確な解析が可能になりました。
- 動物の姿勢の自動認識アルゴリズムが刷新され、より正確に四肢の自動検出が可能になりました。解析時間をより節約できます。
| マウス用 | ラット用 | |
| 全体の寸法 | W 170 × D 170 × H 220 mm | W 300 × D 300 × H 350 mm |
| 全体の重量 | 1 kg | 2.5 kg |
| センサーパッド寸法 | 110×110 mm | 250× 250 mm |
| センサー1個あたりの感度 | 0~4 g | 0~40 g |
| 精度 | ±0.02 g | ±0.15 g |
| ケージの材質(床) | PPC (グレー) | |
| ケージの材質(壁および上部カバー) | PPC (透明) | |
| ソフトウェアの推奨システム環境 | Windows 10, 11 Intel coreシリーズ: 2.5 GHz以上 メモリ最小8GB ディスプレイ: 最小1920 × 1080 USBポート2個以上 |
|
| 動画フレームレート | 30 fps | |
| 動画解像度 | 680×480 p | |

解析画面1 動物の動きごとに、様々なパラメータを算出

解析画面2 動物の姿勢ごとにグラフ表示
測定パラメータ
- 各肢にかかる体重負荷、平均負荷、変動係数
- 前肢、後肢の体重負荷比率
- 各肢の面積
標準構成
- 動物用ケージ
- センサーパッド 1枚
- Web カメラ
- ソフトウェア
| 型式 | 品名 |
|---|---|
| BIO-DWB2-M | マウス用体重負荷測定装置 |
| BIO-DWB2-R | ラット用体重負荷測定装置 |
| BIO-DWB2-DUAL | マウス・ラット用体重負荷測定装置 |
| オプション | |
| BIO-DWB-M-C | マウス用センサーパッド(交換用) |
| BIO-DWB-R-C | ラット用センサーパッド(交換用) |
| BIO-DWB-CAL-M | マウス用DWBキャリブレーションキット(スペア) |
| BIO-DWB-CAL-R | ラット用DWBキャリブレーションキット(スペア) |
| BIO-DWB-VIEW2D | 高画質USBカメラ |
| BIO-DWB-POSTUR | DWB2用add-on ソフトウェア(postural parameter) |
関連商品比較
| 品名 |
47885 Librae インキャパシタンステスター |
GA.I.T AI搭載歩行解析装置 |
体重負荷試験装置 - Dynamic Weight Bearingテスト |
DigiGait 小動物用歩行解析システム |
|---|---|---|---|---|
| メーカー | Ugo Basile | Ugo Basile | BIOSEB | Mouse Specific |
| 画像 |  |
 |
|
 |
| 対象動物 | マウス・ラット | マウス | マウス・ラット | マウス・ラット |
| 価格(1低~5高) | 1 | 4 | 3 | 5 |
| 採用文献数*1 | 298 | 0*2 | 306 | 1430 |
| 測定の主目的 | 左右の後肢にかかる荷重の不均衡(姿勢の偏り) | 歩行時の歩容(ストライド、接触面積、速度等) | 4肢すべての荷重分布、重心、姿勢の変化 | 歩行時の歩容(ストライド、接触面積、速度等) |
| 動物の状態 | 静止状態(拘束) | 運動状態(自発歩行) | 自由行動(非拘束) | 運動状態(強制歩行) |
| 主な指標 | 左右後肢の重量差(g)、パーセンテージ | 歩幅、歩隔、接地時間、スイング速度、圧力、体幹パラメータなど | 4肢それぞれの荷重(g)、接触面積、姿勢パターン | 歩幅、歩隔、接地時間、スイング速度、圧力 |
| センサー方式 | デュアルロードセル(後肢のみ) | 高解像度カメラとAIによる画像解析 | 高密度圧力センサーマトリックス(床面) | 高速カメラ(透明なモーター駆動ベルトの下から撮影) |
| 主な用途 | 関節炎、術後痛、神経損傷の評価 | 関節炎、ALS、パーキンソン病、筋ジストロフィー、運動耐容能の評価 | 関節炎、術後痛、変形性関節症、自発的な痛みの評価 | 関節炎、ALS、パーキンソン病、筋ジストロフィー、運動耐容能の評価 |
| メリット | 操作が非常にシンプルで、迅速なデータ取得が可能 | 歩行の力学的な質を詳細に数値化できる、AI解析で高精度 | 動物へのストレスが少なく、より自然な痛みの反応を捉えられる | 速度を一定に強制できるため、自発歩行では隠れてしまう微細な運動障害を顕在化できる |
*1 2026年4月時点でGoogle Scholarにて"メーカー名"+"製品名"で検索
*2 2025年10月リリースと新しいため、まだ出回っていないと考えられる。